


Introduction
The development and deployment of robotics technology in extreme environments, such as nuclear downgrading, offshore maintenance, spatial exploration and in -depth exploitation have received considerable attention in recent years. In all these areas, robots are necessary to reduce the risks associated with operations staff, generally by removing the needs for people to enter dangerous environments and increase the productivity of high and congested installations. There have been significant efforts in robotics research in this area, for example to make robotic systems capable of surviving in the presence of high levels of radiation and toxic substances, to operate at extreme pressures and temperatures, and to perform safe tasks in unstructured environments. We have seen that there are many inter-domain challenges on which robotics researchers in extreme environments work (Figure 1).
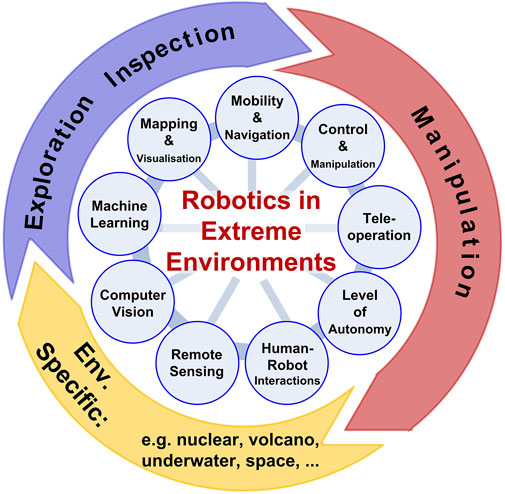
Figure 1. Overview of research subjects and robotics challenges in extreme environments.
In the context of robotics in extreme environments, we raised the research subject aimed at bringing together the latest cutting -edge research in the field, to deepen current understanding and share research challenges. This electronic book includes a collection of eight articles, published by Frontiers in Robotics and AI on the subject.
Overview of the content of the electronic book
Let’s push things forward: an investigation into the robot push
Stüber et al. Present an overview of the current state of art in the thrust of robots. Pushing objects is a crucial skill that mobile robots need for a wide range of applications, including tasks in extreme environments. The authors compared more than 50 publications dividing them into six categories: purely analytical, hybrid, dynamic analysis, physical motor, data focused and in -depth learning. A particular objective was given to the problem of predicting the movement of the object to be pushed. The authors conclude the document with final remarks, including open problems.
Radiation manipulator radiation tolerance methodology before nuclear waste handling
Zhang, et al., Present a radiation tolerance test methodology for robotic manipulators, covering key aspects of the process, emulation of the radiation environment to the configuration of hot cell tests, acquisition and data analysis. The group of universities of Bristol and Manchester applied their methodology to a Kuka robotic arm and showed that it was surprisingly robust to radiation. These results suggest that the complete spectrum of modern industrial robot products can be viable (with appropriate modifications) for practical use in future nuclear distance operations.
A holistic approach to human supervisory humanoid operations in extreme environments
Paper (Wonsick et al.) Written by researchers from the Northeastern University and Irish Manufacturing Research pay attention to the physical interaction aspects of a humanoid using glove boxes in terms of surface mechanics, sole and extended arms operations. The authors present their concepts and their initial ideas on the creation of humanoid operations, human supervisions that will make sense for the operations of the glove box and will provide pragmatic information on how humanoid robots will have to be extended to 1 day to be used in extreme environments.
Radiation mapping and laser profiling using a robotic manipulator
The characterization of nuclear materials, in particular in inherited installations, is of great importance and in this article (White et al.), researchers from the University of Bristol, working with Kuka Systems, have developed a robotic system, integrated into a radiation detector and a flight time sensor to provide distance measures to any scanned object and the level of gamma activity there. Using the manipulator to raster on the surface of an object, the proposed technique is capable of producing three -dimensional radiation maps.
Radiological mapping of nuclear post-catastrophe nuclear environments using unanswered air-winging air systems: a Chernobyl study
This item (Connor et al.) describes a study led by researchers from the University of Bristol to the use of an unanswered air -winging system to map radioactive contamination on relatively important land areas. The capacities of the proposed system have been demonstrated by deployment in the Chernobyl exclusion zone (CEZ), where it generated dose cards for radiation of large field zones which were in accordance with more expensive manual surveys.
BVLOS Unoccupied air systems operations in highly tubulent volcanic plumes
Wood et al. Provide information on the operation of unoccupied air systems (UAS) in highly tubulent volcanic plumes. They have a detailed analysis of three missions in which the team has piloted a fixed wing UAS beyond the visual line of view in the plumes of Manam Volcano, Papuasie-Nouvelle-Guinée. The document contains a detailed description of the UAS used and gives an overview of the panache sampling applications, the authors making recommendations for physical parameters and propulsion systems of the aircraft used to take measurements in turbulent volcanic panchers.
Automatic fracture characterization using tactile and local optical detection
Palermo et al. Present a tailor -made tactile and proximity sensor that can be used for automatic detection of surface cracks. This approach can be more suited to the operation in extreme environments where, for example, the radiation can damage electronic components of commonly used detection devices. For detection, the sensor slides on different surfaces and saves the data. Using automatic learning, the team can then classify fractures and other mechanical characteristics with average ∼94% crack detection and classification precision of ∼80%.
Segmentation of simultaneous materials and 3D reconstruction in industrial scenarios
Zhao et al. Present a new approach to learning to transfer for the segmentation of materials and the categorization of RGB images, with a particular emphasis on nuclear waste. The authors combine learning to transfer with recurring neural networks to carry out a sensitive annotation to limits and a 3D semantic reconstruction. In addition, the authors have generated a new set of data which includes RGB image fixes and RGB images annotated entirely on pixels in addition to the public data set Materials in context (MINC).
Conclusions
The eight articles in this electronic book show a wide range of cutting -edge technologies and multidisciplinary approaches based on different use scenarios. Each article shows the latest progress in research and actively discusses current technological problems. Thanks to this collection of articles, we can share common problems and future perspectives. We expect it to help make a breakthrough and promote optimal integration of systems from different fields of science and technology.
Contributions from authors
All the authors listed contributed to the subject of research and this editorial article in a substantial and intellectually. All have agreed to publication.
Conflict of interest
The author, RS, is director of Arm Robotics Ltd.
The remaining authors say that research has been carried out in the absence of commercial or financial relations which could be interpreted as a potential conflict of interest.
Publisher’s note
All complaints expressed in this article are only those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, publishers and examiners. Any product that can be evaluated in this article, or complaint that can be made by its manufacturer, is not guaranteed or approved by the publisher.
Thanks
We thank all the authors and all the examiners for their precious contributions.
Keywords: Robotics, handling, autonomous systems, remote operation, human robot interaction, detection
Quote: Takahashi C, Giuliani M, Lennox B, Hamel WR, Stolkin R and Semini C (2021) editorial: robotics in extreme environments. In front. Robot. IA 8: 744092. Doi: 10.3389 / Frobt .2021.744092
Received: July 19, 2021; Accepted: July 27, 2021;
Posted: August 19, 2021.
Copyright © 2021 Takahashi, Giuliani, Lennox, Hamel, Stolkin and Semini. This is an article in free access distributed under the terms of the Creative commons attribution license (CC by). The use, distribution or reproduction in other forums is authorized, provided that the authors of origin and the copyright (s) are credited and that the original publication in this review is cited, in accordance with the academic practice accepted. No use, distribution or reproduction is authorized which does not respect these terms.
*Correspondence: Chie Takahashi, Y2HPZS5RLNRHA2FoyxNOAUBNBWFPBC5JB20 =